Accidente UBER: ¿Podría un Volvo "normal" haber salvado a la peatona imprudente?
El accidente fatal con una peatona y un coche semi-autónomo de UBER en fase experimental ha sido noticia mundial, y sus ecos aún resuenan. Con una buena porción de información ya disponible, pero con muchas incertidumbres todavía, aquí van algunas conclusiones extraídas de la consulta a voces expertas e implicadas en la conducción autónoma.


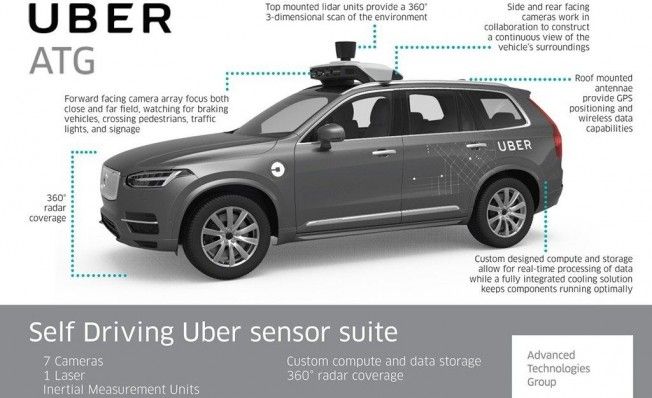
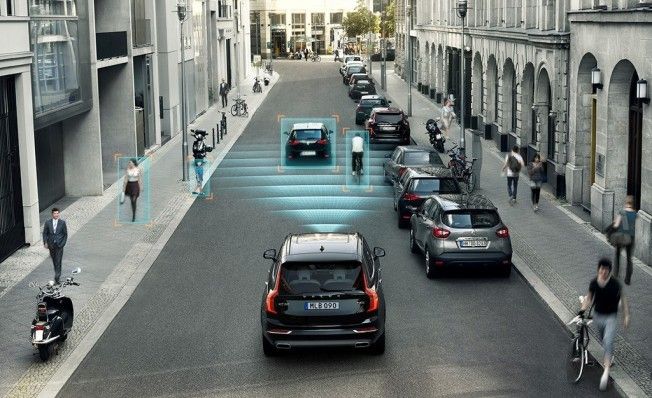
Así es el Volvo XC90 usado por Uber para el desarrollo de su tecnología de conducción autónoma.
El Volvo de Uber implicado en el polémico accidente forma parte de una flota de miles de XC90 que la marca Sueca ha vendido a la firma americana para desarrollar su propio sistema de conducción autónoma. Pero todo el sistema de conducción autónoma del Volvo de UBER es de UBER, no de Volvo. Es un desarrollo propio de la start-up americana, que consta de (ver imagen superior):
- 1 escáner láser LIDAR que funciona en 360º (es lo que va montando en el techo).
- 9 radares (con diferentes rangos de alcance y campos de visión).
- 6 cámaras analizadas por un software específico (es decir, la señal que generan las cámaras es analizada por un software que las interpreta). Son de 9 mpx y de desarrollo propio.
- 16 sensores de ultrasonidos (se suelen usar para detectar objetos a corta distancia).
Con toda esta panoplia de sensores, el coche de UBER en su estado actual es un nivel 3 en los 5 niveles de la conducción autónoma (de 1 a 5). Nivel 3 significa que el coche puede conducir de forma autónoma en determinadas situaciones de tráfico, pero la presencia de un conductor/a es requerida en todo momento. Como nivel 3 –las particularidades de los niveles de conducción pueden ser consultadas en este otro artículo, no es objeto de éste texto–, el tiempo desde que el sistema deja de funcionar y alerta al ocupante es corto, de menos de 10 segundos en todo caso, y en algunas situaciones incluso menos, por lo que la persona que ocupa el coche NO DEBERÍA desentenderse del entorno y la conducción en ningún momento, aunque no tenga las manos comandando el volante.

Así son los Volvo XC90 que está empleando Uber en sus pruebas diarias.
Quizá la diferencia más importante entre un nivel 3 y un nivel 4 es que en un nivel 4 el tiempo que pasa hasta que el conductor debe de tomar los mandos puede ser mucho más largo, puesto ya que se ha incorporado una capa de redundancia en la automatización de la conducción que no existe en el nivel 3. No existe actualmente ningún coche de producción en serie con nivel 4, y los pocos que llegan a nivel 3 están en los "inicios" de este estadio. Waymo (Google) está haciendo en estos momentos sus primeras experiencias de coche sin conductor.
En las imágenes disponibles, se aprecia que una persona, que caminaba con una bicicleta y varios bultos, cruza de manera casi perpendicular dos carriles de una vía en zona de extrarradio urbano –un entorno extremadamente común en los EEUU–. La peatona cruza por una zona indebida y literalmente aparece de entre las sombras.
Cabe señalar, llegados a este punto, que la cámara cuyas imágenes se han difundido es una cámara similar a las usadas por los coches de policía o los automóviles en Rusia. Simplemente está ahí como las cámaras en cualquier oficina, edificio o lugar a vigilar. No forma parte del sistema de seguridad de conducción autónoma. Tiene frecuencia de cuadros baja, pobre rango dinámico y un acusado efecto «rolling shutter», que literalmente se come información en la escena en relación al factor tiempo*.

Punto exacto del accidente del Volvo de UBER. La peatona cruzó por una zona indebida.
La pobreza de imagen se materializa en que no se puede certificar realmente cuál era el nivel de luminosidad de la escena. Una cosa es cuándo la cámara nos permite ver el momento de aparición de la peatona, y otra cuándo un ojo humano hubiera podido verlo en esas condiciones de luz. O dicho de otro modo, lo que nos muestra la cámara no sirve del todo para calcular cuándo el ocupante del coche podría haber visto a esa persona de entre las sombras.
La clave de todo esto es que el coche de UBER va equipado con sistemas como radares y escáner LIDAR, a los que no afecta la oscuridad para hacer su trabajo. Ese coche sí puede "ver" en la oscuridad.
Tomando como referencia la posición y movimiento de la peatón, su tamaño, e incluso sin acceso a la telemetría registrada por el coche (algo a lo que sí deberían acceder los peritos y los jueces), es plausible afirmar que el coche de UBER debería de haber detectado a la peatón, y haber obrado en consecuencia. La imagen del interior del coche no nos proporciona sonido (por si saltó alguna alerta), y tampoco conocemos si hubo alguna deceleración, pero todo parece indicar que no, o si la hubo, a todas luces fue insuficiente.
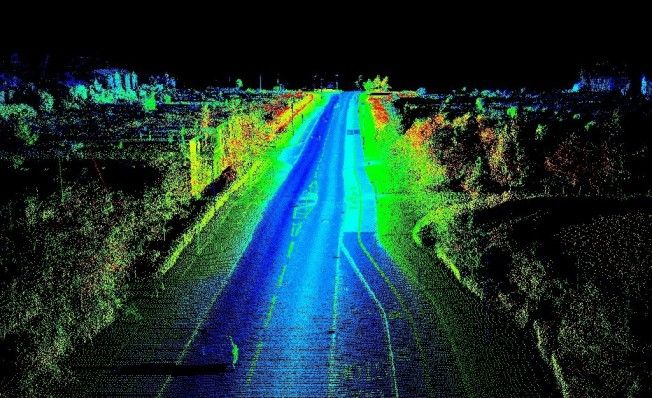
Así es la imagen generada por un escáner LIDAR como con el que estaba equipado el Volvo de UBER.
¿Qué falló entonces? Factor humano. Sí, la principal causa del accidente es la imprudencia de la peatona. ¿Podría el coche de UBER haber hecho más después de todo lo que sabemos? También. Sobre qué pudo fallar, hay pocas pociones, pero no son fáciles:
- El sistema no funcionaba.
- Una mala calibración de los sensores.
- Una fusión de datos deficiente. Respecto a este punto, conviene señalar que hay varios modos de interpretar y unir la ingente información que llega de toda esta fuente de sensores descrita. Ninguna es perfecta, todas son válidas, cada una tiene ventajas o desventajas.
Sabemos que Tesla, por ejemplo, pone mucho peso en la visión artificial (cámaras), de hecho Tesla es la única empresa que ha decidido no usar LIDAR, por el momento, para su concepto de conducción autónoma. En esa fusión de datos, una aproximación es considerar una de las cámaras como elemento "maestro", y el resto de sensores lo que hacen es corroborar con sus mediciones lo que está viendo el sensor "maestro".

Señal en la que se indica que debe cruzarse la carretera a través de un paso de peatones cercano.
Tomemos esta idea y traspasémosla al coche de UBER. Imaginemos que el coche de UBER basa su detección de peatones en una cámara, y que el radar y el LIDAR, que son capaces de "ver" en la oscuridad aportan atributos adicionales (velocidad del objeto, distancia con el objeto, etc). Si la cámara no "ve" al peatón, aunque el radar y el LIDAR estén detectando el objeto, no van a provocar ninguna actuación en los frenos puesto que dependen del "master".
¿Es esto lo que ha pasado en el automóvil de UBER? No, no se puede asegurar, ni mucho menos. Es un ejemplo de una fusión de datos deficiente aplicada a una situación como la ocurrida. Sólo el análisis de la telemetría, todos los conocidos como "logs" que se hayan podido recuperar del accidente, más la información de las cámaras, podrán determinar qué es lo que falló, si es que falló algo.
Analizado esto, queda un factor más a determinar, el factor humano, que en este caso queda en un segundo plano por las características del accidente ocurrido, pero que deja en evidencia a UBER.
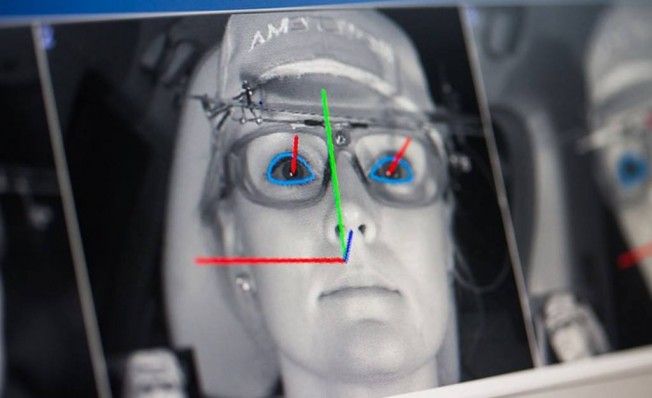
El factor humano fue la principal causa del accidente. El ocupante del coche debería haber prestado una mayor atención al tráfico.
¿Debería la ocupante del coche haber estado más atenta al tráfico, en función de todo lo comentado? Indudablemente, SÍ. En la imagen del interior del coche se ve a la supervisora pasando más tiempo mirando algo que tiene en la zona inferior, fuera del cuadro de la cámara, que al tráfico. Y aquí radica otra de las claves de este asunto. ¿Qué instrucciones tenía la operaria de UBER a la hora de hacer su trabajo y cómo hacerlo?
¿Podría una persona completamente atenta a la conducción haber evitado el impacto con la peatona? Aunque es imposible definirlo con una precisión absoluta, parece realmente complicado, se diría que NO. Pero de nuevo, no lo sabemos. Desde luego, sea posible o no, la actitud de esa persona no era la adecuada para afrontar una situación de emergencia, al margen de ESA situación en concreto.
Ya hay voces que piden, para este tipo de pruebas, que se estandarice un sistema de monitorización de los ocupantes de los coches para confirmar su nivel de atención, para corregirlo con avisos si es necesario, como ya pasa en automóviles que están en la calle con los sensores de distracción, pero en un nivel, entiendo más exigente y avanzado, en relación a la misión de estos trabajadores.
Volvo ya cuenta con tecnologías de detección de peatones avanzado.
Y un último apunte. Ya existen en el mercado, desde hace un tiempo, coches con visión nocturna, y también con sistemas de detección de peatones, puntuados con 5 estrellas en la nueva NCAP (desde 2018): para tener 5 estrellas en NCAP es obligatorio que el sistema también funcione por la noche. Estos sistemas (Audi, Mercedes, BMW... y Volvo, por ejemplo) se basan en cámaras de alto rango dinámico (muy sensibles en condiciones de poca luz), en la señal de un radar, o a partir de la mezcla de la información de la cámara y del radar.
De entre todas las marcas con un sistema de detección de peatones avanzado, Volvo está entre las mejor puntuadas en este aspecto de la seguridad. Así las cosas, después de todas estas vueltas, ¿Podría un coche de Volvo no "uberizado" haber salvado a la peatona de su lamentable y fatal imprudencia? Quién sabe, pero no habiendo pasado el examen el coche de UBER, desde luego se puede considerar como más probable -esto es una opinión personal-.
En EEUU mueren cada año 40.000 personas en accidentes de tráfico, más de 100 al día, de las cuales 16 son peatones. Cada día. Damos por casi por normal la fatalidad diaria relacionada con una actividad hasta la fecha humana, pero la intermediación de una máquina en una situación similar hace saltar todas las alarmas y llevar el asunto a la primera plana planetaria.
Si algo tiene de "bueno" este incidente (con toda la pena y respetos a la fallecida) es que hay muchos sistemas tomando mediciones, por lo que se va a poder extraer una, esperemos, rica información que, al igual que sucede cuando hay un accidente aéreo, ayude a mejorar los sistemas automatizados para que un escenario idéntico no vuelva a tener idéntico resultado. Porque nos guste o no, al contrario que en la aviación, el 95% de las muertes en accidente de tráfico tienen su origen en un error humano.
*Pruebe a hacer una fotografía de las líneas de la carretera, cuando circule como pasajero, con su móvil en el coche. Verá cómo "por arte de magia" algunas de las líneas del suelo desaparecen, al no poder la velocidad de lectura del sensor alcanzar la velocidad a la que se mueve el coche.