Bosch y Daimler explican los tipos de sensores y cámaras para conducción autónoma
Bosch y Daimler, el proveedor mundial de componentes electrónicos y mecánicos para la industria del automóvil y el grupo alemán, avanzan en la tecnología de conducción autónoma. Las últimas investigaciones en esta materia apuntan al desarrollo de un sistema de navegación explicándonos cuáles son los órganos principales para un funcionamiento con éxito.


La tecnología Intelligent Drive de Mercedes permite liberar al conductor de los mandos
Seguramente has oído hablar, en muchas ocasiones, de la conducción autónoma y cómo se está montando en diferentes niveles en los modelos que se encuentran actualmente a la venta. Por ponerte un ejemplo, el nuevo Mercedes Clase C hace gala de funciones de conducción autónoma de nivel 2, lo cual es posible por la fusión de sensores, la combinación de de diferentes tecnologías como cámaras ópticas, sensores de radar, de ultrasonidos o LIDAR.
La función principal de estos es controlar continuamente el entorno en tiempo real y ayudan al vehículo a encontrar su camino. Pero no sólo son los cuatro componentes principales de la tecnología de conducción autónoma, sino también de la última creación que Bosch y Daimlerse encuentran desarrollando actualmente: un sistema de navegación autónomo. Proveedor y grupo automotriz nos explican las características de cada uno de los componentes, que tienen sus ventajas y desventajas.
Cámaras ópticas
Las cámaras ópticas de los modelos de Mercedes cuentan con un sensor con millones de diodos sensibles a la luz. Dependiendo del número de estos, la resolución de la cámara varía. Su funcionamiento es como el de una cámara convencional: cuando la luz incide sobre el sensor, se transforma en unas señales electrónicas que son procesadas por el propio software de la cámara.
Normalmente, se montan en el parabrisas delantero para tener una vista hacia delante e, incluso en la luneta trasera para una vista posterior o en las laterales si se requiere vista lateral. Con las cámaras ópticas, se procede al reconocimiento de señales de tráfico, semáforos, gestos de policías que dirigen el tráfico o peatones desplazándose hacia la carretera y que se encuentren entre 50 y 500 metros, lo cual al disponer de una precisa imagen es posible clasificar y distinguir entre personas, animales y objetos y darle la mayor importancia a cada uno de ellos.

En el parabrisas de los modelos de Mercedes se ubica la cámara estéreo, apenas perceptible a simple vista
Sensores de Radar
Son otro tipo de sensores que recogen información gracias a la emisión de ondas electromagnéticas y rebotar contra los objetos procesándose el eco generado y pudiendo medir distancias, velocidad y tamaño al objeto utilizando el efecto Doppler, es decir, según el aumento o disminución de la frecuencia de una onda sonora cuando la fuente que la produce y la persona que la capta se alejan la una de la otra o se aproximan la una a la otra
Además, permiten localizar la posición y si esta cambia comparando la amplitud y la fase de las señales de radar medidas, ya se encuentren estáticos o en movimiento, independientemente de las condiciones climatológicas y de la hora del día. En los modelos de la marca alemana suelen instalarse detrás del emblema de la estrella en la parrilla o en los paragolpes proporcionando información desde apenas 20 centímetros hasta 250 metros y midiendo todos los valores relevantes (ángulo, distancia, velocidad, parámetros del material), sin necesidad de cálculos añadidos.
Sensores LIDAR
A menudo usados en la industria, especialmente para los niveles más básicos de funciones de conducción autónoma, estos sensores se basan en el funcionamiento de la luz láser midiendo el tiempo que transcurre entre el punto desde el que se emite y el choque con el objeto ofreciendo una información más interesante que los sensores de radar convencionales. Normalmente, ofrecen información de todo el perímetro del vehículo encontrándose en los paragolpes delantero y trasero e, incluso en el techo.
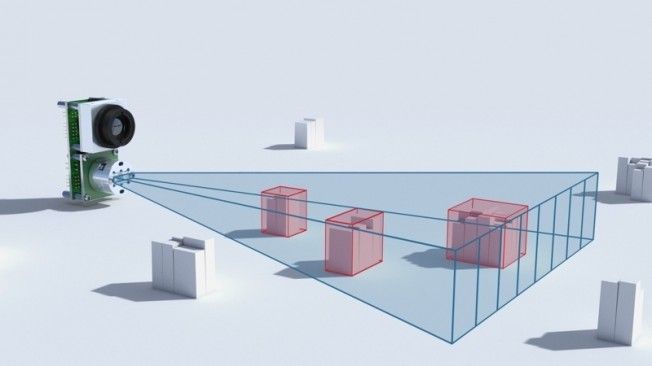
Así funciona un sensor LIDAR: emitiendo una luz láser capaz de detectar y medir con precisión la distancia a un objeto en el espacio
Pero todos ellos tienen una serie de ventajas y desventajas que hacen considerar su uso en determinados modelos o no hacerlo, por lo que a continuación exponemos una tabla con los pros y los contras que cada uno de estos elementos presenta.
| Sistemas | Ventajas | Desventajas |
|---|---|---|
| Cámaras | - Buen funcionamiento en condiciones de lluvia y oscuridad - Adaptable a diversas tareas utilizando diferentes lentes - Capaz de reconocer colores - Ángulo de escaneo de hasta 180°, según la necesidad | - Problemas en condiciones de niebla o cuando está sucia - Sujeta a ilusiones ópticas naturales: lo que parece igual, es lo mismo - Solo entiende lo que ha sido clasificado - Mide ángulos, todo lo demás es calculado |
| Sensores de Radar | - A prueba de inclemencias meteorológicas - Resolución constante y precisión en el haz - Puede incluso “ver” por debajo del coche - Ángulo de escaneado hasta 80° | - No reconoce colores - Reconocimiento de formas limitado - Considera la radiación electromagnética durante la integración en el vehículo - Se requiere simulación, por ejemplo, vibración del parachoques del vehículo |
| Sensores LIDAR | - Miden con precisión en 3D distancia, posición y altura - Alcance de hasta 200 metros o más, según el objeto | - Alcance reducido en condiciones adversas o de suciedad - No reconoce colores, pero sí las diferencias de reflexión dependiendo del material - Los de alta resolución son muy caros - Restricciones estrictas debido a las regulaciones de seguridad ocular |
Sensores de Ultrasonidos
Hasta ahora no se han utilizado como un estándar pero cada vez tienen mayor presencia, por ejemplo, en los asistentes de aparcamiento, ya que garantizan una perfecta transmisión de información de la distancia al objeto más próximo -máximo seis metros- y a baja velocidad. Estos sensores se basan en los murciélagos enviando cortas señales de sonar que rebotan en los obstáculos y producen unos ecos que se analizan en una unidad central.
Sensor de vídeo
Los sensores de vídeo se montan en las cámaras estéreoscópicas -más conocidas como estéreo- y cuenta con dos lentes para detectar imágenes en el espacio. Montada en el Mercedes Clase S, ofrece un rango de medición totalmente tridimensional capaz de captar imágenes con suma precisión superando los 50 metros de todo el entorno del vehículo, si bien a día de hoy lo más común es que se instale en los faros delanteros y en el parabrisas para proporcionar una imagen de la vista que tenemos en el frente.
En un futuro más lejano -para cuando la conducción autónoma sea plena sin la intervención del propio conductor, entonces se montarán en otra áreas del vehículo para controlar todo el perímetro. Pero, por ahora, lo que ofrece es mucho más de lo esperado y es es capaz de detectar los objetos que se encuentran en el camino, medir su distancia, e incluso reconocer a peatones parcialmente oscurecidos, determinar de manera fiable si el arcén puede ser transitado o no o reconocer caracteres -diferenciando entre letras y números- en las señales de tráfico.

