Reconocimiento de objetos entre la niebla, nueva tecnología de conducción autónoma
Un equipo de la Universidad de Stanford trabaja en nuevas soluciones aplicables a la tecnología de conducción autónoma. Sus investigadores han logrado un algoritmo informático capaz de reconstruir objetos cuando se conduce bajo una espesa niebla, uno de los grandes peligros.


La niebla es uno de los fenómenos meteorológicos más peligrosos a los que nos enfrentamos los conductores. Una densa capa impide dilucidar a los vehículos que nos preceden en carretera, ralentizando la velocidad para evitar accidentes. Si es un gran peligro en la conducción humana, en la autónoma se convierte casi en una trampa mortal.
Es precisamente esta cuestión la que preocupa a los investigadores de la Universidad de Stanford, que han sido capaces de desarrollar un algoritmo informático capaz de dilucidad e identificar correctamente los objetos parados o en movimiento que se encuentren por delante de un coche autónomo.
La tecnología de reconocimiento de objetos de la Universidad de Stanford se basa en la actual generación de ADAS
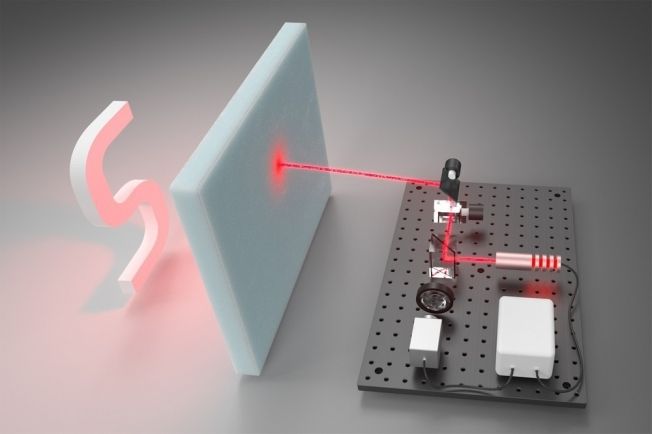
La nueva tecnología se basa en un algoritmo que, mediante láser y detectores de fotones, el movimiento de partículas luminosas, puede reconstruir qué es lo que se encuentra por delante. Los desarrolladores han aplicado fotones balísticos, aquellos que se emiten desde el detector al objeto a través del campo de dispersión y regresan al dispositivo sin dispersarse.
Los ensayos se han realizado utilizando una plancha de espuma con 25 milímetros de espesor y la aplicación de fotones que golpean el objeto, después de atravesar esta plancha, rebotando nuevamente al detector. Un potente software sigue el movimiento de los fotones, calculando la distancia y reconstruyendo el objeto en tres dimensiones.
Gordon Wetzstein, responsable del proyecto en estudio, apunta que se trata de un autentico éxito y un importante avance en la tecnología de conducción autónoma, ya que existen otros sistemas láser pero hasta ahora no era necesario conocer la distancia al objeto a reconocer.
Fuente: Universidad de Stanford

