Desarrollo de un deportivo, un vistazo a su proceso
Todos tenemos un deportivo especial que nos quita el sueño, que estamos deseando conducir. Para conseguir tal nivel de prestaciones y transmitir esas sensaciones al volante hay mucho trabajo detrás. Acompáñame para echar un vistazo a los elementos más importantes que tenemos en cuenta a la hora de desarrollar un deportivo.


Es curioso cómo se puede llegar a resultados parecidos de formas tan diferentes. Esto se aplica en muchas circunstancias y en el mundo del motor -más en concreto en el segmento de superdeportivos- no es una excepción.
Tal vez lo más importante sea que el cliente sepa qué sensaciones quiere obtener al adquirir este tipo de vehículo. ¿Velocidad? ¿Confort? ¿Manejo ágil en circuito? Se puede deducir con facilidad que no es fácil conciliar todas estas características y por eso las marcas ofrecen varias versiones del mismo deportivo. Pongamos como ejemplo la gama del Porsche 911 que incluye modelos más adaptados para el uso diario como el Carrera S hasta los más extremos -y menos confortables eso sí- GT3 RS o GT2 RS.

Así pues, los equipos de desarrollo y dinámica de las marcas son responsables de dar al vehículo sus cualidades de conducción. Los objetivos prestacionales tales como velocidad máxima, aceleración o paso por curva de los distintos modelos son predefinidos por equipos tanto de ingeniería como de management - en la industria de automoción se suelen definir como los "atributos de vehículo". Es evidente que no se busca lo mismo en la conducción de un Clase S que en la de un Mercedes-AMG GT R.
Para ello, las marcas y OEMs (original equipment manufacturers) trasladan a sus ingenieros a circuitos de prueba - o proving grounds - que disponen de todo tipo de pistas ya sean de velocidad máxima, terrenos bacheados o circuitos para poner a prueba la agilidad de manejo tanto en seco como en mojado.
Uno de espacios de ensayo más importantes es IDIADA, que se encuentra en Tarragona (España) y es muy conveniente debido a su buen clima que permite ensayos durante todo el año. Otros incluyen Nardo, situado en Lecce (Italia) que adquirió Porsche en 2012. Famoso por su "anillo" de 12 km para pruebas de velocidad máxima y su pista de manejo en seco.
La relación con el software de análisis
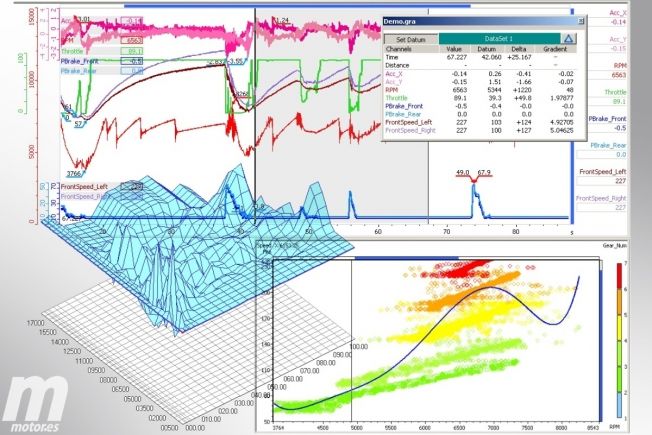
Existen softwares de análisis de datos para ayudar al ingeniero a calibrar de manera óptima los diferentes sistemas del vehículo. Wintax, ATLAS, Vektor CANape o Bosch Windarab son algunos de los más comunes. Su objetivo es ofrecer toda la información concerniente a las prestaciones, ya sean parámetros básicos como la velocidad, ángulo de giro del volante, porcentaje de aplicación del freno o acelerador a otros más específicos como la velocidad de cada rueda, temperatura de admisión al turbo (si el motor va equipado con uno), carga aerodinámica...
El formato más común para un análisis rápido es el despliegue gráfico de dichos parámetros. Es posible utilizar información recogida mediante sensores para calibrar diferentes sistemas. Además, el software es muy versátil y permite la programación de expresiones matemáticas (canales matemáticos) si queremos sacar información de algo concreto para inferir comportamientos como el subviraje y el sobreviraje. Por supuesto, el software utilizará estas expresiones para crear las gráficas, así que es importante que sean correctas.

La esencia de un superdeportivo
Un superdeportivo tiene rasgos fáciles de identificar. Para empezar, son modelos anchos y bajos para mantener un centro de gravedad bajo y suelen contar con un considerable despliegue de geometrías aerodinámicas complejas. Una de las diferencias prestacionales -entre otras- donde este tipo de vehículo debe sobresalir por encima del resto es el paso por curva, debe de ser rápido y la carrocería no debe dejarse “estorbar” por las aceleraciones laterales en el paso por curva.
Dicho de otro modo, intentaremos reducir el ángulo de inclinación – o body roll – de la carrocería en lo más posible al girar esta. En términos físicos estamos hablando del «roll gradient», medido en grados de inclinación por cada “G” de aceleración lateral (G = 9.81 m/s2).
Para un superdeportivo, el valor del roll gradient puede ser de unos 1,5 grados / G mientras un turismo común puede llegar a 8,0 grados / G. Para lograr esta menor inclinación amortiguadores duros son empleados, sacrificando así algo de confort. La rigidez se puede cuantificar en términos de fuerza necesaria para comprimir el amortiguador por una cierta distancia.

Esto nos dará el spring ratio, medido en Newtons por milímetro (N/mm). Un amortiguador duro siempre tendrá un spring ratio alto, es decir requerirá aplicar más fuerza para ser comprimido por una cierta distancia “x” que un amortiguador más blando. En el AMG GT R Pro, por ejemplo, es posible ajustar la compresión y rebote de los amortiguadores. En conducción deportiva, se aumenta el porcentaje de amortiguación para la compresión mientras si buscamos confort se destina un menor coeficiente de amortiguación a la compresión y más al rebote.
Hay más motivos para el uso de amortiguadores duros en este tipo de vehículo. Teniendo en cuenta que la carrocería va montada relativamente cerca del suelo para mantener un centro de gravedad bajo, un set de amortiguadores blandos dejaría que ésta sufriera mayores cambios de altura con respecto al suelo, especialmente en frenadas fuertes incrementando así el riesgo de golpear con el suelo. Una suspensión dura es también de gran ayuda desde el punto de vista de prestaciones de aerodinámica.
Tengamos en cuenta que la carga aerodinámica del vehículo es función de la altura de la carrocería con respecto al suelo (entre otras cosas). Además, ésta carga aumenta al aumentar la velocidad y esto pondrá un peso extra en la carrocería ; unos amortiguadores blandos "se dejarían" comprimir en mayor medida por éste peso extra lo que causaría cambios de altura de la carrocería, forzando a ésta a acercarse al suelo más de lo deseado y alejándonos de los rangos de altura ideales del eje delantero y trasero a los cuales las prestaciones de aerodinámica son óptimas.
La suspensión también nos lleva al concepto de balance del vehículo que es típicamente indicado por el subviraje y el sobreviraje. Durante el subviraje las ruedas delanteras son empujadas hacia la parte exterior de la curva y en el sobreviraje la zaga se descoloca; sin buenas reacciones para contravolantear o sin electrónica para salvarnos esta situación puede acabar en un trompo.
Los conductores profesionales darán su opinión durante el desarrollo del vehículo. Sin embargo, necesitamos también las herramientas de software y sensores mencionados anteriormente para poder cuantificar estos comportamientos. Una forma de hacer esto es medir por separado la aceleración lateral del eje delantero y trasero. De esta forma, es razonable asumir que el eje con mayor magnitud de aceleración en curva será el que tenga más agarre. Teniendo esto en cuenta la siguiente condición puede ser definida:
- Si la aceleración del eje frontal es superior a la del eje trasero, resultará en sobreviraje.
- Si la aceleración del eje frontal es inferior a la del eje trasero, resultará en subviraje.

Usando la lógica, es posible crear un canal matemático que sustraiga la aceleración delantera de la trasera. Si la diferencia de esta resta es positiva entonces tendremos subviraje y viceversa. Si decidimos decantarnos por este método, entonces los sensores (giroscopios) deberán estar situados donde la línea central del vehículo hace intersección con el centro del eje delantero y trasero.
Una vez hayamos realizado el ensayo, nos referiremos a los datos obtenidos y en función de ello se pueden tomar varias decisiones. Las barras estabilizadoras son una de las partes de la suspensión que se configuran de un modo u otro dependiendo del balance de subviraje/sobreviraje deseado. Son barras rígidas utilizadas para reducir «body roll» durante un giro, y de esta forma conseguimos reducir la transferencia de peso a las ruedas exteriores de la curva y tener una distribución de peso más equitativa entre todas ellas.
También se usan para cambiar el subviraje y el sobreviraje. Si queremos reducir el subviraje, podremos reducir la rigidez de la barra estabilizadora delantera o incrementar la rigidez de la trasera. Si lo que buscamos es reducir el sobreviraje, entonces se puede incrementar la rigidez de la barra estabilizadora delantera o reducir la rigidez de la trasera.

La importancia de una carga aerodinámica equilibrada
De igual modo, la distribución de la carga aerodinámica – o «downforce» – también afecta al balance. Demasiada carga delante y el coche tenderá a sobrevirar, demasiada carga atrás y tendremos subviraje. Así que no es sólo cuestión de “cuanto más downforce, mejor”. Mucha carga y una buena distribución nos ayudará a reducir el patinaje de la rueda, ayudando así a mejorar la aceleración longitudinal del vehículo a la salida de curvas lentas y cuidar el desgaste de los neumáticos.
La desventaja es una mayor carga aerodinámica casi siempre resulta en más resistencia aerodinámica – o drag – disminuyendo así la velocidad máxima del coche. Por eso es importante saber que es exactamente lo que buscamos – véase como el Bugatti Chiron SuperSport 300+ tiene un diseño que va enfocado a conseguir un drag bajo – ¡y alcanzó nada menos que 490,5 km/h en el circuito privado de Ehra-Lessein! Un dato curioso es que en la Nevada State Road 160el vehículo habría alcanzado los 515 km/h gracias a una menor densidad del aire en esa localización según las simulaciones de la marca, propiedad de Volkswagen.
La calibración del control de tracción
La información recopilada también puede ayudar, por ejemplo, a la calibración de sistemas como el ABS o el control de tracción. Pongamos un ejemplo simple de este último. El objetivo del control de tracción es impedir total o parcialmente que la rueda patine al acelerar el coche. Está claro que para su funcionamiento el sistema necesita información de ciertos parámetros con el fin de saber qué está ocurriendo en una situación de conducción, como por ejemplo acelerando fuerte a la salida de una curva lenta.

Para empezar, necesitamos sensores para medir la velocidad de cada rueda. Los valores se mandarán a la ECU (Electronic Control Unit) correspondiente que transformará los resultados en km/h.
La velocidad total del vehículo, "Vvehículo", puede ser hallada sumando las velocidades angulares – transformadas en km/h por la ECU - de todas las ruedas y dividiendo entre 4:
Vvehículo = [vdi + vdd + vti + vtd] / 4
Donde:
- vdi = velocidad rueda delantera izquierda
- vdd = velocidad rueda delantera derecha
- vti = velocidad rueda trasera izquierda
- vtd= velocidad rueda trasera derecha
De esta forma, es posible saber a qué velocidad angular debe girar una rueda para que esté en concordancia con velocidad total del vehículo en m/s (“Vvehículo” en esta expresión).

Si una rueda gira más deprisa que la velocidad total a la que se mueve el vehículo, entonces el control de tracción se accionará para frenar la rueda y evitar así que patine.
También podremos utilizar la información recopilada de la velocidad angular de las ruedas para el ABS, ya que es posible saber si una rueda bloquea cuando, por ejemplo, su velocidad es de 25 m/s y la velocidad total del coche es de 40 m/s. Imaginemos ahora que el vehículo acelera fuerte en la salida de una curva lenta y al alcanzar 50 km/h comienza a perder tracción.
Esto también implica una pérdida en aceleración longitudinal. En este punto, la velocidad de las ruedas será más alta que 50 km/h y el control de tracción actuará para frenarlas y llevarlas de nuevo a la velocidad total del coche.

